Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
Выбор синхронного или асинхронного двигателя: советы и рекомендации
При выборе между синхронным и асинхронным двигателем следует учитывать несколько факторов, чтобы определить наиболее подходящий тип для конкретного применения.
1
Требования к точности скорости: Если важно иметь точное управление скоростью двигателя, то синхронные двигатели более подходят, так как они имеют постоянное отношение между частотой и скоростью вращения
2. Нагрузка: Для некоторых типов нагрузок, таких как насосы и компрессоры, асинхронные двигатели обычно являются оптимальным выбором из-за их высокого коэффициента мощности.
3. Экономические соображения: Стоимость синхронных двигателей, особенно с постоянными магнитами, может быть значительно выше, чем у асинхронных двигателей. Поэтому, если нет необходимости в точном управлении скоростью или других особых требованиях, асинхронные двигатели могут быть экономически более выгодным выбором.
4. Размер и вес: Синхронные двигатели часто имеют более компактный дизайн и меньший вес по сравнению с асинхронными двигателями той же мощности. Это может быть важным фактором при выборе двигателя для ограниченного пространства или мобильных устройств.
5. Надежность и долговечность: Асинхронные двигатели обычно более надежны и имеют долгий срок службы, благодаря своей простоте и отсутствию комплексных узлов, как в случае синхронных двигателей.
Важно помнить, что каждое приложение имеет свои уникальные требования, и выбор двигателя должен быть основан на анализе конкретных условий и потребностей
Эффективность
Синхронный и асинхронный двигатели обладают разной эффективностью работы. Эффективность двигателя определяется как отношение мощности полезного действия к затратам энергии. В случае синхронного двигателя эффективность достигает своего максимального значения при работе на постоянной частоте, что обусловлено особыми свойствами магнитного поля.
Асинхронный двигатель, в свою очередь, может работать как на постоянной, так и на переменной частоте. Он имеет однофазную обмотку, которая обеспечивает надежность и долговечность работы двигателя. Однако, асинхронный двигатель немного менее эффективен по сравнению с синхронным двигателем, так как на него оказывает влияние изменяющееся магнитное поле.
Синхронный двигатель обладает высокой эффективностью работы при постоянной частоте и стабильных оборотах. Он обеспечивает плавное и стабильное вращение, что делает его идеальным для использования в промышленности.
Синхронный двигатель
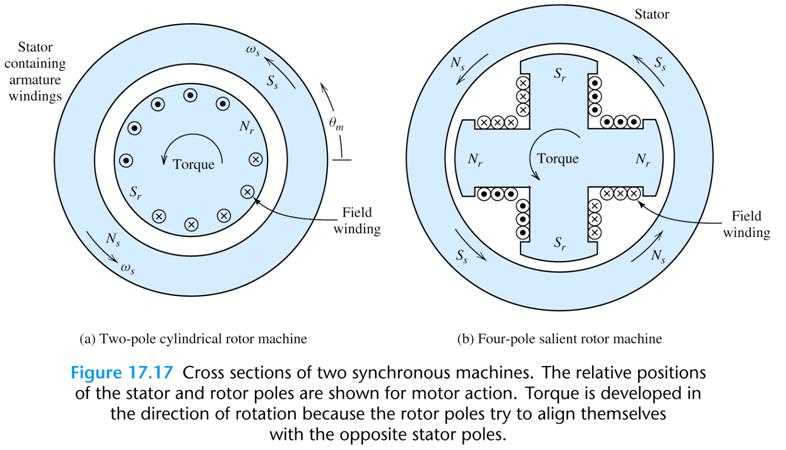
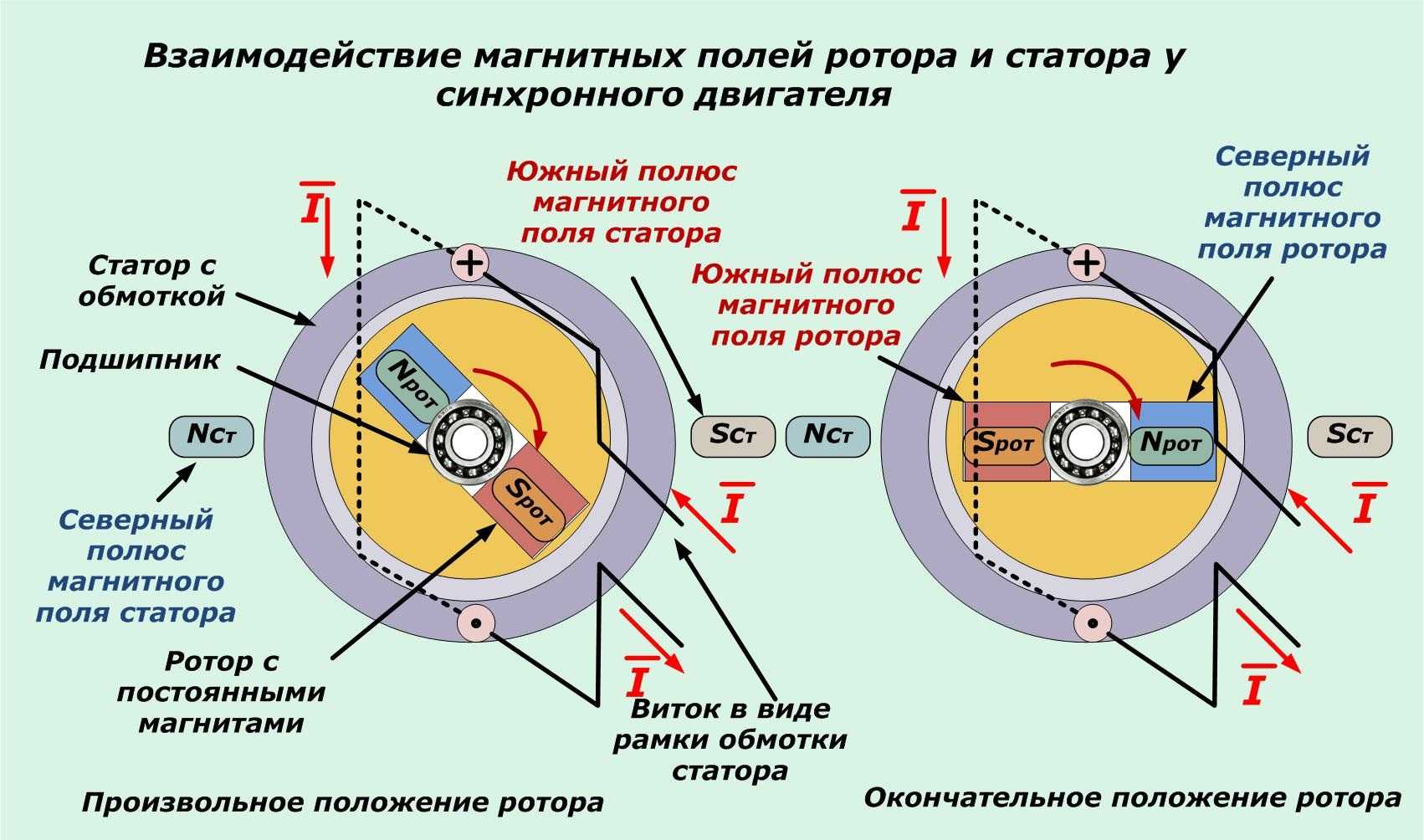
Основной принцип работы синхронного двигателя заключается в замешательстве электромагнитного поля вокруг обмотки ротора с постоянной магнитной индукцией. Это создает магнитное поле вокруг ротора, которое вращается синхронно с полями статора. В результате, ротор синхронного двигателя вращается вместе с магнитным полем.
Синхронный двигатель обычно используется в приложениях, где требуется точное управление скоростью и синхронность вращения со сигналом питания. Он также может быть однофазным или трехфазным, что позволяет его использование в различных системах переменного тока.
Асинхронный двигатель
В работе асинхронного двигателя используется принцип индукции, когда вращающийся магнитный полюс ротора индуцирует в обмотках статора ток, создающий вихревые потери и магнитное поле. Это поле взаимодействует с магнитным полем статора, вызывая вращение ротора.
Асинхронные двигатели имеют две основные разновидности — однофазный и трехфазный. Однофазные асинхронные двигатели обычно используются в бытовой технике и небольших мощностях, в то время как трехфазные асинхронные двигатели наиболее распространены в промышленности. Однофазные асинхронные двигатели часто требуют дополнительные устройства для пуска и регулирования скорости, так как у них нет встроенной возможности самозапуска.
Частота переменного тока, подаваемого на статор асинхронного двигателя, является постоянной и определена стандартами электроснабжения (обычно 50 или 60 Гц). Скорость вращения ротора зависит от числа пар полюсов, сконструированных в статоре двигателя. Чем больше число пар полюсов, тем меньше скорость вращения.
Чем отличается синхронный двигатель от асинхронного?
Основная задача электродвигателя — преобразовывать электрическую энергию в механическую. Сегодня электродвигатели изготавливаются как постоянного, так и переменного тока. Среди двигателей переменного тока лидируют асинхронные и синхронные двигатели. Асинхронные двигатели малой и средней мощности относятся к группе наиболее часто используемых электродвигателей. Они широко используются как в промышленности, так и в бытовой технике.
В промышленности чаще всего используются асинхронные двигатели трехфазные. Они используются, например, в энергетике — в качестве приводов для собственных нужд электростанций, в строительстве, на транспорте, в коммунальном хозяйстве — в качестве приводов насосов водоснабжения и т. д.




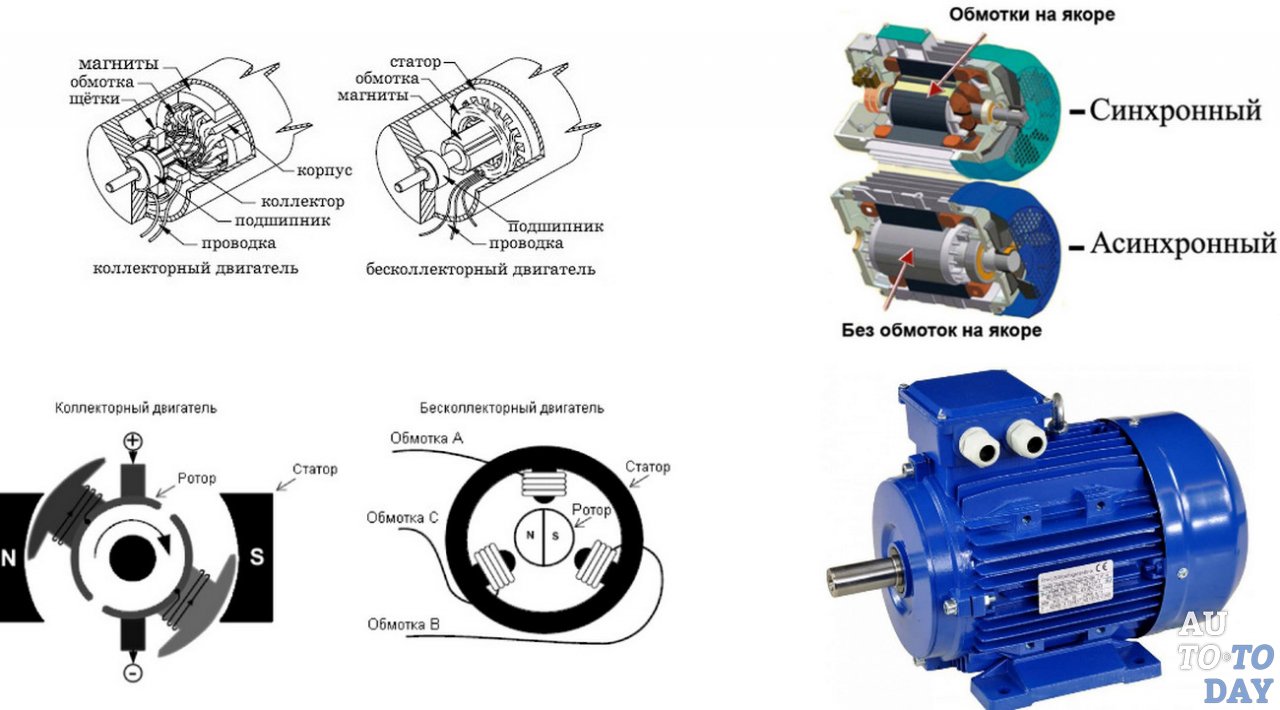





Отличие асинхронного электродвигателя от синхронного
С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. У обоих электродвигателей есть неподвижный статор, состоящий из обмоток (катушек), которые уложены в пазы сердечника, набранного из пластин, выполненных из электротехнической стали, и подвижный ротор. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
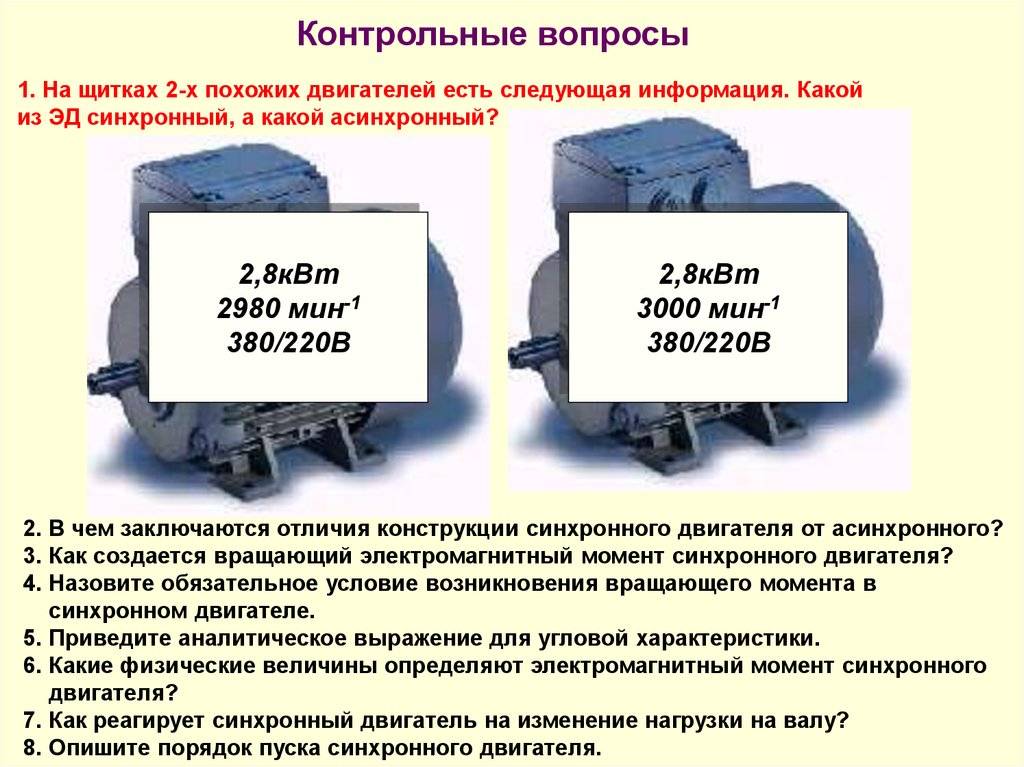
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора. И поэтому у асинхронного двигателя есть такой параметр — как СКОЛЬЖЕНИЕ — разность скоростей вращения ротора и вращающегося магнитного поля в статоре. У синхронного электродвигателя частота вращения ротора всегда равна частоте вращения электромагнитного поля.
У этих двух типов двигателей разные области применения: синхронные электродвигатели отличаются гораздо большей мощностью и полезной нагрузкой, но они дороже и сложней. И поэтому асинхронные двигатели востребованы там, где достаточно их характеристик, ведь они дешевле и проще в изготовлении.
Синхронные двигатели
Синхронные двигатели имеют довольно сложную конструкцию, обусловленную наличием щеточного узла. Кроме того, для их работы требуется дополнительный источник постоянного тока. Еще одним недостатком является невозможность их эксплуатации в условиях частых пусков и остановов. Однако все это компенсируется большой мощностью, высоким КПД, устойчивостью к перепадам напряжения в питающей сети и стабильной частотой вращения вала, вне зависимости от величины нагрузки на него.
Синхронные электрические машины рентабельны при мощностях свыше 100 кВт и основное применение находят для вращения мощных вентиляторов, на различных металлургических производствах, для привода насосов, которые обладают не только значительной мощностью, но и долгим режимом функционирования т.д.
Асинхронный двигатель
Асинхронный двигатель в отличие от синхронных машин более чувствителен к колебаниям напряжения и не может сохранять номинальную скорость вращения, при увеличении нагрузки. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска. Но простота конструкции, длительный срок эксплуатации, универсальность применения, способность работать в режиме частых включений и остановок делают эти машины наиболее распространенными в промышленном и бытовом секторе.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
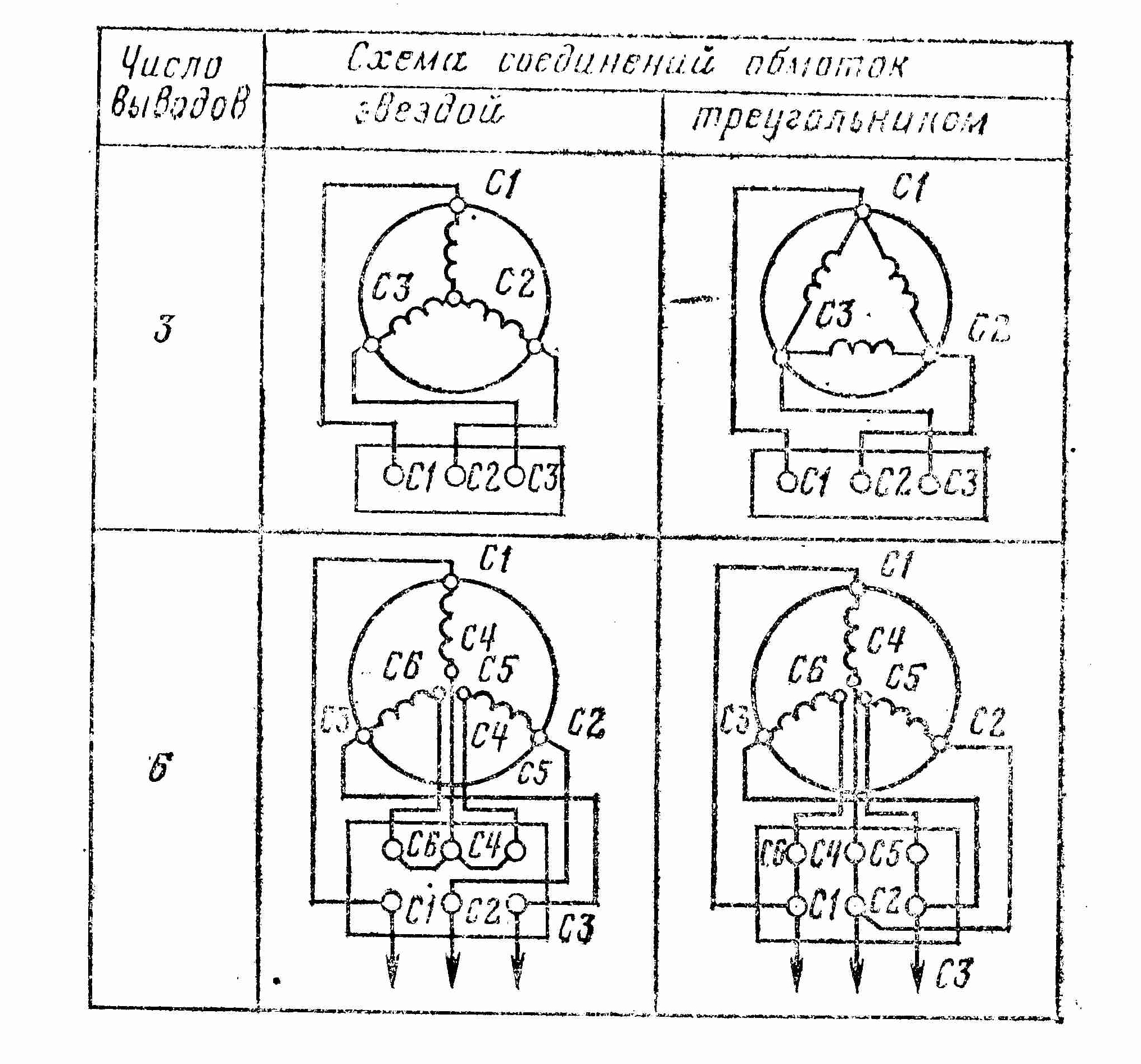
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
Варианты устройства синхронных двигателей
Разновидности роторов
Принцип работы ротора
Один из вариантов конструкции двигателя
Ротор с постоянными магнитами
Гистерезисный движок
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
Классический движок с индуктором
Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть
Тем самым увеличивается эффективность электроснабжения
Для этой цели делаются специальные движки, называемые синхронными компенсаторами
Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.


![Как работает электродвигатель [для чайников]](https://otlichaet.com/wp-content/uploads/9/d/6/9d642cfae1105512e2c96dc5a7ee113c.jpeg)





Движки-компенсаторы на подстанции
Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Подписка на рассылку
На сегодняшний день использование синхронных двигателей получило широкое распространение в сфере производства оборудования, работающего с постоянной скоростью, которое применяется в разных сферах человеческой деятельности. В связи с этим, существует несколько способов запуска синхронных электродвигателей, наиболее распространенные варианты которых будут представлены ниже.
Способы пуска синхронного электродвигателя
Способы пуска синхронного электродвигателя достаточно сложны, в этом заключается один из основных недостатков электродвигателей данного типа. Запуск синхронных электродвигателей осуществляется либо посредством воздействия вспомогательного пускового двигателя, либо с помощью асинхронного пуска. Рассмотрим каждый из способов в отдельности.
Асинхронный пуск синхронного электродвигателя
Асинхронный пуск синхронного электродвигателя предполагает расположение дополнительной короткозамкнутой обмотки в полюсных наконечниках полюсов ротора. Это необходимо, чтобы обеспечить во время пуска вывод чрезмерно большой Э.Д.С., образующейся в обмотке (1), что является возможным благодаря замыканию рубильника (2) на соединение (3). Благодаря тому, что магнитное поле, возникающее в результате включения напряжения трехфазной сети в обмотке статора (4), пересекает короткозамкнутую обмотку (пусковую обмотку), находящуюся в полюсных наконечниках ротора, индуктируются токи.
Действие этих токов в сочетании с вращающимся полем статора, запускают во вращение ротор, который постепенно набирает обороты. Достигнув 95-97% количества оборотов рубильник (2) ротора переходит в состояние, которое вынуждает обмотку ротора включить сеть постоянного напряжения.
Асинхронный пуск синхронного электродвигателя не лишен недостатков, точнее сказать, недостатка, которым является большой пусковой ток, который по значению может превышать в 7 раз рабочий ток. Столь высокое значение пускового тока является причиной падения напряжения в сети, что негативно сказывается на функционировании других потребителей энергии. Одним из наиболее распространенных вариантов решения упомянутого недостатка является использование автотрансформатора для понижения напряжения, а также использование тиристорных возбудителей для пуска синхронных электродвигателей, которые отличаются высоким К.П.Д. Именно высокое значение К.П.Д. во многом определило выбор тиристорных возбудителей в качестве комплектов большей части выпускаемых синхронных электродвигателей крупных размеров. К тому же, применение тиристорных возбудителей позволяет автоматизировать процесс подачи возбуждения синхронному двигателю. Автоматизация может быть реализована 2-мя способами: подача возбуждения синхронному двигателю в функции скорости и подача возбуждения синхронному двигателю в функции тока. При этом контроль подачи возбуждения синхронному двигателю в функции тока осуществляется с помощью реле тока.
На сегодняшний момент именно асинхронный пуск синхронных двигателей получил наибольшее распространение, так как его достаточно просто реализовать, а работает он крайне надежно.
Пуск синхронного двигателя при помощи вспомогательного двигателя
Пуск синхронного двигателя при помощи вспомогательного двигателя предполагает запуск синхронного электродвигателя благодаря работе другого двигателя, работа которого позволяет ротору синхронного двигателя развернуть полюса, осуществляя дальнейшее вращение совершенно самостоятельно. Чтобы запуск произошел, нужно создать условия, при которых количество пар полюсов асинхронного двигателя было бы меньше количества пар полюсов синхронного двигателя. Порядок запуска синхронного двигателя предполагает включение рубильника (3), пуск вспомогательного асинхронного двигателя (2), осуществляющего разворот ротора синхронного двигателя (1) до скорости, которая соответствует скорости поля статора. Далее включаются полюсы ротора после включения рубильника (4). При включении синхронного двигателя в сеть трехфазного тока, требуется синхронизация, осуществляемая реостатом (5). Реостат организует возбуждение, позволяющее установить напряжение обмотки статора, определяемое вольтметром V, равное напряжению в сети, которое указывает вольтметр V1.
Эффективность асинхронного и синхронного двигателей
Асинхронные и синхронные двигатели имеют различные уровни эффективности, которые влияют на их применение в различных областях.
Асинхронные двигатели обычно более эффективны в низконагруженных и переменных условиях работы. Они хорошо справляются с изменениями нагрузки и могут работать с переменными скоростями. Это особенно полезно в приложениях, где требуется изменять скорость двигателя для регулирования процесса. Кроме того, асинхронные двигатели имеют более низкие стартовые токи и могут эффективно регулировать мощность.
С другой стороны, синхронные двигатели имеют более высокие уровни эффективности при стабильных нагрузках и постоянной скорости вращения. Они особенно полезны в приложениях, требующих постоянной скорости и высокой точности вращения, таких как вентиляторы, насосы и компрессоры. Синхронные двигатели также могут обеспечивать лучшую регулируемость и стабильность вращения в условиях повышенной нагрузки.
Выбор между асинхронным и синхронным двигателем зависит от конкретного приложения и его требований к скорости, точности и стабильности
Важно учитывать потребности процесса и оптимизировать экономический и энергетический аспекты при выборе между этими двумя типами двигателей
Подробное объяснение разницы между синхронным и асинхронным двигателем приведено ниже.
- Синхронный двигатель — это машина, скорость вращения которой и скорость магнитного поля статора равны. Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей синхронной.
- Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с переключаемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет проскальзывание, поэтому величина проскальзывания не равна нулю.
- Синхронный двигатель требует дополнительного источника питания постоянного тока, чтобы первоначально вращать ротор близко к синхронной скорости. Асинхронный двигатель не требует дополнительного источника запуска.
- Кольцо скольжения и щетки требуются в синхронном двигателе, тогда как асинхронный двигатель не требует кольца скольжения и щеток. Только для асинхронного двигателя намоточного типа требуются контактное кольцо и щетки.
- Синхронный двигатель является дорогостоящим по сравнению с асинхронным двигателем.
- КПД синхронного двигателя выше, чем асинхронного двигателя.
- Изменяя возбуждение, коэффициент мощности Синхронного двигателя можно соответствующим образом отрегулировать как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с запаздывающим коэффициентом мощности.
- Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость Синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается самостоятельно, тогда как асинхронный запускается самостоятельно.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, тогда как оно влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин. Асинхронный двигатель работает превосходно. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. так далее
- Различные применения Синхронного двигателя заключаются в том, что он используется на электростанциях, в обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Различия в регулировке скорости
Регулировка скорости асинхронного двигателя по изменению частоты питающего напряжения
Один из наиболее простых и распространенных способов регулировки скорости асинхронного двигателя — это изменение частоты питающего напряжения. При увеличении частоты питания скорость вращения двигателя также увеличивается, а при уменьшении — уменьшается. Этот метод наиболее эффективен, когда требуется широкий диапазон регулировки скорости.
Регулировка скорости асинхронного двигателя с помощью частотного преобразователя
Другими методами регулировки скорости асинхронного двигателя является использование частотного преобразователя. Частотный преобразователь позволяет изменять и контролировать частоту питающего напряжения, что в свою очередь влияет на скорость вращения двигателя. Такой подход позволяет более точно управлять скоростью и особенно полезен в случаях, когда требуется высокая точность и стабильность.

![Как работает электродвигатель [для чайников]](https://otlichaet.com/wp-content/uploads/4/0/d/40d44c78aa9fcee8c6afd6b54cf93a2a.jpeg)
| Метод регулировки скорости | Преимущества | Недостатки |
|---|---|---|
| Изменение частоты питания | — Простота— Широкий диапазон регулировки | — Возможность изменения скорости только в пределах некоторого диапазона— Снижение крутящего момента при понижении частоты |
| Использование частотного преобразователя | — Высокая точность и стабильность регулировки— Большой диапазон регулировки скорости | — Высокая стоимость оборудования— Дополнительные требования к электрической сети и схемам управления |
Выбор метода регулировки скорости асинхронного двигателя зависит от конкретных требований и условий эксплуатации. Каждый из описанных методов имеет свои преимущества и недостатки, и выбор должен быть основан на анализе конкретной ситуации.
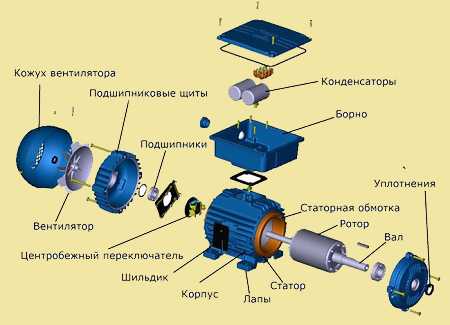
Устройство и принцип работы
 Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель

Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
